Lorsqu'on aborde la question des propriétés mécaniques des matériaux cristallins, on oppose souvent les métaux, qui sont ductiles du fait de la grande mobilité de leurs dislocations, et les matériaux céramiques, dans lesquels les dislocations sont peu mobiles et qui ont donc plutôt tendance à être fragiles et à fracturer. De façon surprenante, le titanate de strontium (SrTiO3) peut se déformer à l'état massif, et à température ambiante. Je m'intéresse aux propriétés des dislocations dans ce matériau afin de mieux comprendre son comportement mécanique.

Fig. 1 - Le titanate de strontium SrTiO3 adopte la forme cubique de la structure perovskite. Les atomes de strontium (Sr, en vert) sont aux coins de la maille cubique, ceux de titane (Ti, bleu foncé) sont au centre de sites octahédriques formés par les atomes d'oxygène (en rouge).
Le titanate de strontium SrTiO3 a des propriétés mécaniques tout à fait étonnantes, caractérisées notamment par une double transition ductile-fragile-ductile (Fig. 2). Ce matériau se déforme plastiquement à basse température, jusqu'à 1050 K environ (régime A). Puis au-dessus de 1050 K, le matériau devient fragile et casse brutalement, avec une contrainte à rupture qui augmente avec la température (régime B). Enfin, à très haute température il redevient ductile (régime C), avec une température de transition qui dépend de l'axe de sollicitation : 1500 K s'il subit une compression suivant un axe <100>, ou 1270 K suivant un autre axe. Ces différents comportements mécaniques et leurs transitions s'expliquent par la structure et les propriétés des dislocations.
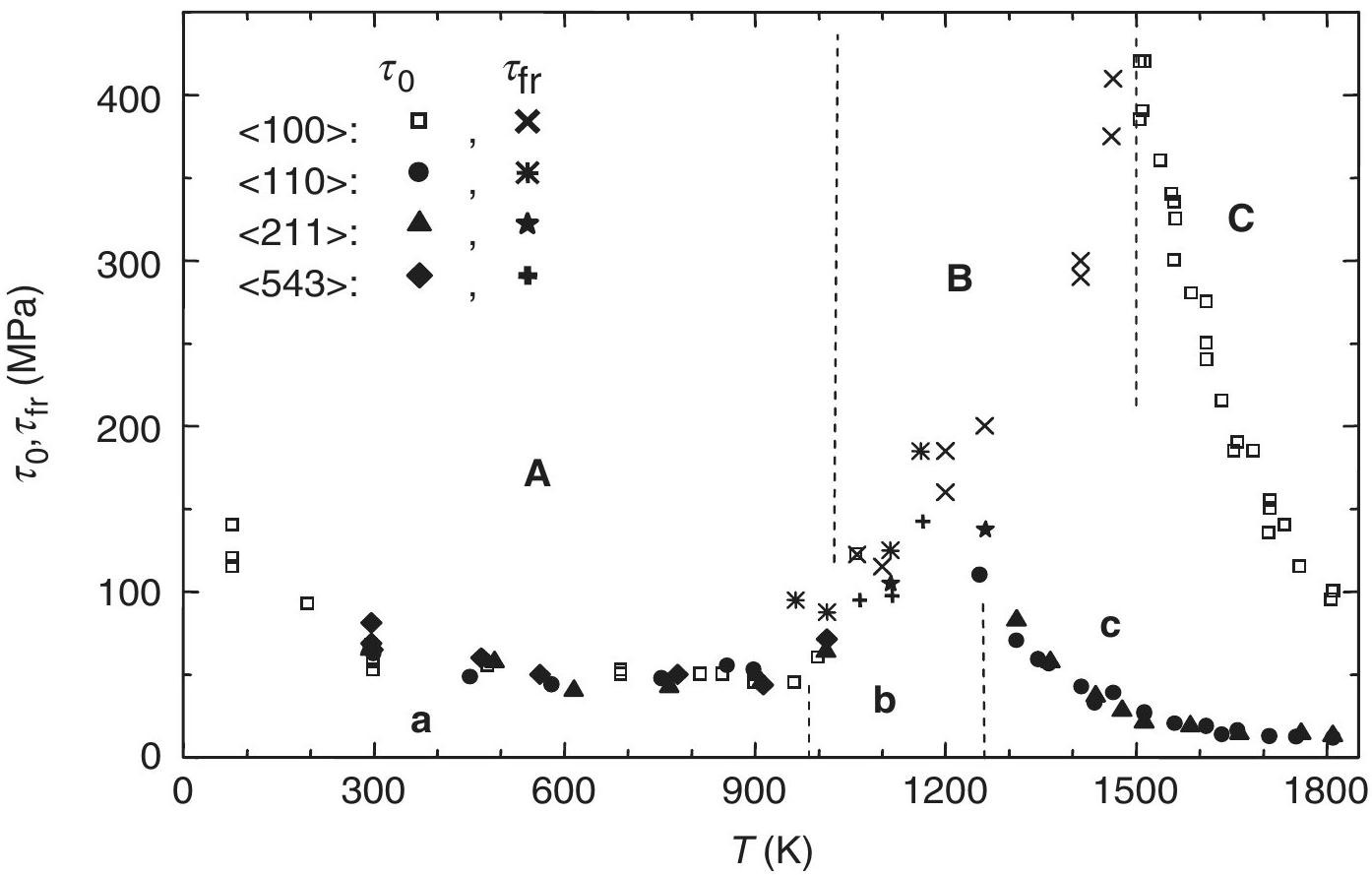
Fig. 2 - Courbe de déformation de SrTiO3 monocristallin en fonction de la température. τ0 est la contrainte d'écoulement dans les régimes ductiles A et C, et τfr est la contrainte de rupture dans le régime fragile B. Tiré de la Ref.[1].
À basse température (T<1050 K) la ductilité est permise principalement par le glissement dans des plans {110}, de dislocations de vecteur de Burgers <110>. Ce vecteur de Burgers est grand (5.5 Å), aussi ces dislocations se dissocient-elles en partielles colinéaires séparées par un défaut d'empilement, appelé joint d'antiphase (en anglais anti-phase boundary ou APB) :
<110> → ½<110> + APB + ½<110>
L'énergie du joint d'antiphase, qui détermine la distance d'équilibre entre les deux partielles, a été l'objet de nombreuses études expérimentales et théoriques, qui lui attribuent des valeurs allant de 0.2 à 1.2 J/m2. Dans un premier temps nous nous sommes donc attachés à étudier ce joint d'antiphase au moyen de calculs ab initio. Cette étude a aussi servi à s'assurer de la précision de différents potentiels interatomiques [2].
Nous avons ensuite modélisé les dislocations <110> à caractères coin et vis, à l'aide de potentiels inter-atomiques. La Fig. 3 montre une dislocation vis dissociée en deux partielles, conformément aux observations expérimentales. Malgré la grande énergie du joint d'antiphase, la distance de dissociation est relativement grande, 30 à 40 Å. Ce résultat s'explique par le fait que les dislocations partielles minimisent leur énergie en s'étalant jusqu'à se recouvrir, augmentant ainsi la largeur globale de la dislocation. Ces résultats ont été publiés dans Acta Materialia [3].
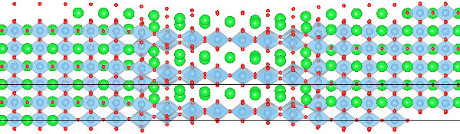
Fig. 3 - Structure à l'échelle atomique d'une dislocation vis dans SrTiO3. Les deux dislocations partielles peuvent être distinguées, mais se recouvrent fortement.
Comme dans beaucoup d'autres matériaux, à basse température ce sont les segments à caractère vis qui sont les moins mobiles, et qui contrôlent donc la plasticité. Sachant que ces dislocations conservent la même structure dans tout le régime A, il est étonnant de voir apparaître une discontinuité dans la contrainte d'écoulement autour de 210 K.
Nous avons donc développé un modèle basé sur la théorie élastique des dislocations, en utilisant des paramètres déterminés par les calculs atomistiques précédents (énergie de défaut d'empilement, largeur de dissociation, énergie de Peierls). Les dislocations vis, étant dissociées, peuvent se mouvoir selon deux mécanismes différents : soit les deux partielles se déplacent de concert, franchissant leurs barrières de Peierls en même temps ; soit une partielle bouge en premier, changeant la largeur du défaut d'empilement, avant que la deuxième ne bouge à son tour. Les barrières d'énergie de ces deux modes de déplacement dépendent de la contrainte appliquée, et leurs fréquences d'activation dépendent de la température. Nous avons pu établir qu'à faible contrainte et haute température, le mouvement corrélé des deux partielles est largement favorable (régime A1). Lorsque la température diminue, il est nécessaire d'augmenter la contrainte pour déclencher la plasticité. À faible température (T<200 K) et forte contrainte, la plasticité est gouvernée par la nucléation de paires de décrochements sur chaque partielle individuelle, l'une après l'autre (régime A3). C'est donc la compétition entre ces deux mécanismes, et leurs dépendances différentes à la contrainte et la température, qui est à l'origine de la discontinuité dans la contrainte d'écoulement autour de 210 K [4].

Fig. 4 - À basse température SrTiO3 se déforme plastiquement, mais il existe une discontinuité dans la contrainte d'écoulement mesurée expérimentalement (points noirs). Nous avons montré qu'il existe une compétition entre deux modes de déplacement des dislocations vis (lignes continues rouge et bleue). Tiré de la ref. [4]
Puisque les dislocations <110> sont si mobiles à température ambiante, on s'attendrait à ce que l'augmentation de la température les rende de plus en plus mobiles, et donc à ce que SrTiO3 reste ductile à toutes températures. Pourtant il n'en est rien. Autour de 1050 K le matériau devient subitement fragile, comme le montre la Fig. 2 ci-dessus. Plusieurs scénarios ont été proposés : à haute température les dislocations <110> pourraient changer de plan de glissement préférentiel, adoptant un plan dans lequel le glissement est plus difficile ; ou bien, elles pourraient se dissocier (ou plutôt, se décomposer) en dislocations <100>+<010>, qui sont moins mobiles ; ou encore, elles pourraient changer de structure de cœur et devenir sessiles.
Afin de départager ces possibilités, nous avons effectué des simulations en dynamique moléculaire, soumettant les dislocations <110> précédemment étudiées à de très hautes températures. Nous avons ainsi pu confirmer que ces dislocations changeaient de structure de cœur à haute température, en se dissociant en deux partielles ½<110> dans leur plan de montée comme illustré sur la Fig. 5. Puisque SrTiO3 est cubique, le joint d'antiphase dans le plan de montée est strictement équivalent à celui dans le plan de glissement, ce qui explique la relative facilité de cette dissociation de montée [5,6].

Fig. 5 - Dans SrTiO3, une dislocation coin <110> peut être électriquement neutre (figures d-g), ou porter une charge positive (a-c). Le joint d'antiphase est surligné avec une ligne pointillée pour mettre en évidence son plan d'étalement. Si la dislocation est dissociée dans son plan de glissement (a ou d), alors elle peut glisser et contribuer à la déformation plastique. Si au contraire, elle est dissociée dans son plan de montée (c ou g), alors elle ne peut plus glisser, le matériau devient alors fragile. Pour la dislocation neutre, la barrière d'énergie est modeste et peut facilement être franchie à haute température (courbe noire). Tiré de la ref. [6]
Cette configuration dissociée en montée est sessile, c'est-à-dire incapable de se mouvoir par glissement. De ce fait, ce changement de structure de cœur est directement responsable de la perte de ce système de glissement, menant à la rupture fragile au-delà de 1050 K.
Il est important de comprendre que ce changement de structure de cœur est pratiquement irréversible : même si le matériau est ramené à une température inférieure à 1050 K, les dislocations qui se sont dissociées en montée ne retourneront pas dans leur état glissile.
À très haute température (T>1270 K) SrTiO3 connaît un second régime ductile (régime C sur la Fig. 2). Cette ductilité ne peut pas être liée aux dislocations <110>, puisque celles-ci adoptent un cœur sessile à haute température. Elle est permise par l'activation d'un autre système de glissement, <100>{010}. C'est d'ailleurs ce qui explique que cette transition fragile-ductile est sensible à l'axe de sollicitation. Si le matériau est comprimé suivant n'importe quelle direction, le glissement s'active dans les plans {010}, permettant la ductilité dès 1270 K (symboles pleins sur la Fig. 2). Mais lorsque le matériau est sollicité précisément suivant un axe <100>, alors la contrainte résolue est nulle dans tous les plans {010}. Il est alors très difficile d'activer le glissement, et le matériau reste fragile jusqu'à 1500 K (symboles vides sur la Fig. 2).
En résumé, SrTiO3 est ductile à basse température grâce aux systèmes de glissement faciles de type <110>{110}. Puis à plus haute température, ces dislocations changent de structure de cœur et se dissocient en montée, menant à un régime fragile. Enfin à très haute température, l'activation d'autres systèmes de glissement, comme <100>{010}, permettent un nouveau régime ductile.
[1] W. Sigle et al., Philos. Mag. 86 (2006) 4809-4821 | doi: 10.1080/14786430600672695
[2] P. Hirel et al., Acta Mater. 58 (2010) 6072-6079 | doi: 10.1016/j.actamat.2010.07.025
[3] P. Hirel et al., Acta Mater. 60 (2012) 329-338 | doi: 10.1016/j.actamat.2011.09.049
[4] S. Ritterbex et al., Philos. Mag. 98 (2018) 1397-1411 | doi: 10.1080/14786435.2018.1438682
[5] P. Hirel et al., Scripta Mater. 120 (2016) 67-70 | doi: 10.1016/j.scriptamat.2016.04.001
[6] P. Hirel et al., Acta Mater. 285 (2025) 120636 | doi: 10.1016/j.actamat.2024.120636
Copyright © Pierre Hirel 2009-2026
